Alles detecteren, lokaliseren en navigeren – maar wel veilig!
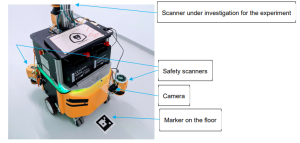
De veiligheidslaserscanner PSENscan levert de afstandsgegevens voor het lokaliseren en navigeren. De gegevens kunnen rechtstreeks via de C++-bibliotheek of als ROS-modulen worden gebruikt. Gebruik ze voor uw eigen SLAM-algoritme (Simultaneous Localisation and Mapping). Zo worden omgevingskaarten voor het navigeren gemaakt en het BTS ontwijkt bijvoorbeeld obstakels. U profiteert van een meer dynamische en bovendien veilige uitvoering van mobiele toepassingen in productieomgevingen.
In de whitepaper over mobiele robotica vindt u veel meer informatie over het gebruik van laserafstandsgegevens voor de robotlokalisatie.
In onderstaande gratis white-paper kunt u hierover meer informatie lezen.